P4072[SDOI]2016征途
我走过万水千山,邂逅了无数美丽与丑陋的灵魂,只为寻找一个留在这个世界上的理由。
题目大意
给出 $n$ 个数$a_1,a_2,\cdots,a_n$,你可以将其恰好分成连续的 $m$ 段,使得这 $m$ 段的和的方差最小。
输入
第 $1$ 行两个正整数 $n,m$
第 $2$ 行 $n$ 个正整数 $a_1,a_2,\cdots,a_n$
输出
$1$ 行 $1$ 个整数,代表最小的方差与 $m^2$ 的乘积(可以证明,此时答案一定是整数)
数据范围
$1 \le n \le 3000, 1\le m \le n, \sum a_i \le 3\times 10^4$
题解部分
前置工作
首先,经典套路拆方差:
记 $x_i$ 为划分出来第 $i$ 段的和,
$$ S^2 = \frac1m\sum_{i=1}^{m}(x_i-\bar{x})^2 $$
$$ m^2\cdot S^2 = m\cdot \sum_{i=1}^{m}(x_i-\bar{x})^2 $$
$$ = m\cdot \sum_{i=1}^{m}(x_i^2+\bar{x}^2-2x_i\bar{x}) $$
$$ = m\cdot \sum_{i=1}^{m}x_i^2 + m\cdot \sum_{i=1}^{m}\bar{x}^2 - 2m\cdot \sum_{i=1}^{m}x_i\bar{x} $$
$$ = m\cdot \sum_{i=1}^{m}x_i^2 + m\bar{x}^2\cdot \sum_{i=1}^{m}1 - 2m\bar{x}\cdot \sum_{i=1}^{m}x_i $$
$$ = m\cdot \sum_{i=1}^{m}x_i^2 - (\sum_{i=1}^{m}x_i)^2 $$
此式第二项为定值可预处理,要求第一项最小,即要求平方和最小。
可以写出一个裸DP:
首先求好前缀和 $s$,
设 $dp_{i,j}$ 表示目前划分到第 $i$ 段,这一段以 $j$ 结尾的最小平方和,
$$ dp_{i,j} = \min_{k<j}\{dp_{i-1,k}+(s_j-s_k)^2\} $$
枚举上一段的结尾,即可转移,复杂度$O(mn^2)$
复杂度错误,考虑优化。
斜率优化
一旦看起来没有状态浪费的DP复杂度错了,其中一定有隐藏的特性来保证复杂度。
展开:
$$ dp_{i,j} = \min_{k<j}\{dp_{i-1,k}+s_j^2+s_k^2-2s_js_k\} $$
因为状态复杂度看起来没有浪费,我们希望去掉转移枚举的复杂度。
我们枚举了 $i,j$ ,那么 $i,j$ 就是定值。现在我们希望不枚举 $k$ 来保证复杂度。
那我们就需要观察一下哪些前继状态是可能对答案有贡献的。
$$ dp_{i-1,k} - s_k^2 = 2s_js_k + dp_{i,j} - s_j^2 $$
把上式拆开左右移项,得到这个式子。由于把 $\min$ 的限制取消了,这里每个 $k$ 都能使方程解出一个 $dp_{i,j}$ ,我们依旧是希望找到一个 $k$ 使得 $dp_{i,j}$ 最小。
接下来是斜率优化经典转换。
我们找到式中与 $k$ 相关的两项,他们都是给出一个 $k$ 能确定的,这两项我们分别记为 $x_k,y_k$ :
$$ x_k = s_k $$
$$ y_k = dp_{i-1,k} - s_k^2 $$
那么每个 $k$ 包含与转移有关的信息量都可以用平面直角坐标系上的一个点表示。
接下来我们再观察 $dp_{i,j}$ 能表示成什么。
$$ 2s_j = w $$
$$ dp_{i,j} - s_j^2 = b $$
我们发现原方程变成了
$$ y_k = wx_k + b $$
其中 $w$ 是固定的常量, $b$ 是未知量,要根据另外三个两确定的。
我们要最小化 $dp_{i,j}$,也就是要最小化 $b$ 。
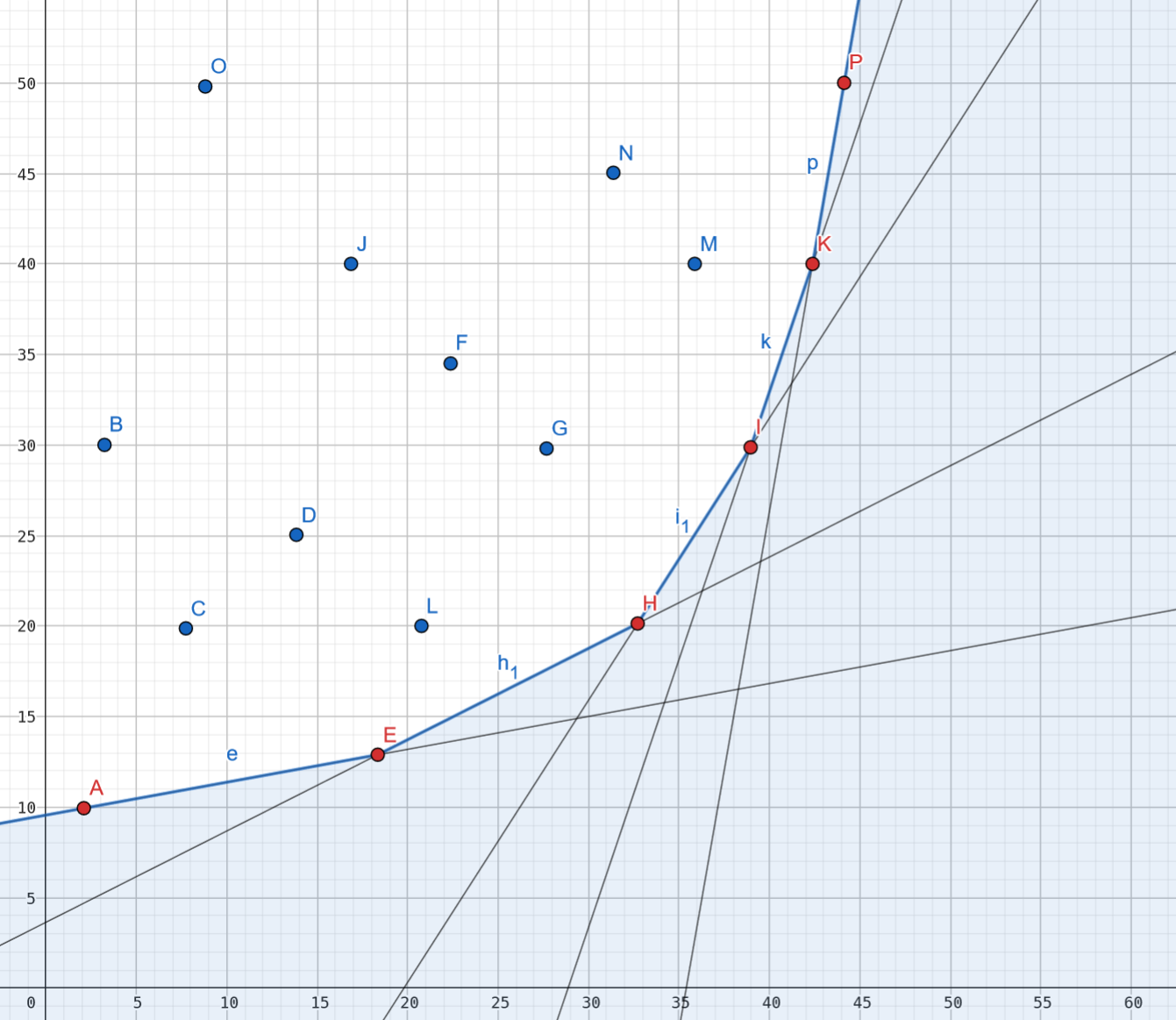
换言之,在平面直角坐标系上,我们枚举完 $i,j$ 后,用一个固定斜率的直线,尝试经过每一个前继状态代表的点 $x_k,y_k$ ,找到一个点能使得截距 $b$ 最小。
画一下:
多动一动直线看看,发现只有最外圈凸包上的点才有可能对答案产生贡献:
要证明也很简单:
如果一个点是可能对答案有贡献的点,即可能有某一斜率的直线需要取这个点才能使截距最小,那么那条斜线过这个点时,除了这个点在这个直线上,其他的点都需要在这个上侧。
这正好是 “凸” 的定义。
- 凸多边形:延长多边形的任意一边为一条直线,若其余的边都在该直线同侧,则称之为凸多边形。——百度百科
那我们只要维护这个凸包就好了。
先考虑加点
如果加入一个点后,这个点完美的融入凸包,那就不需要任何调整: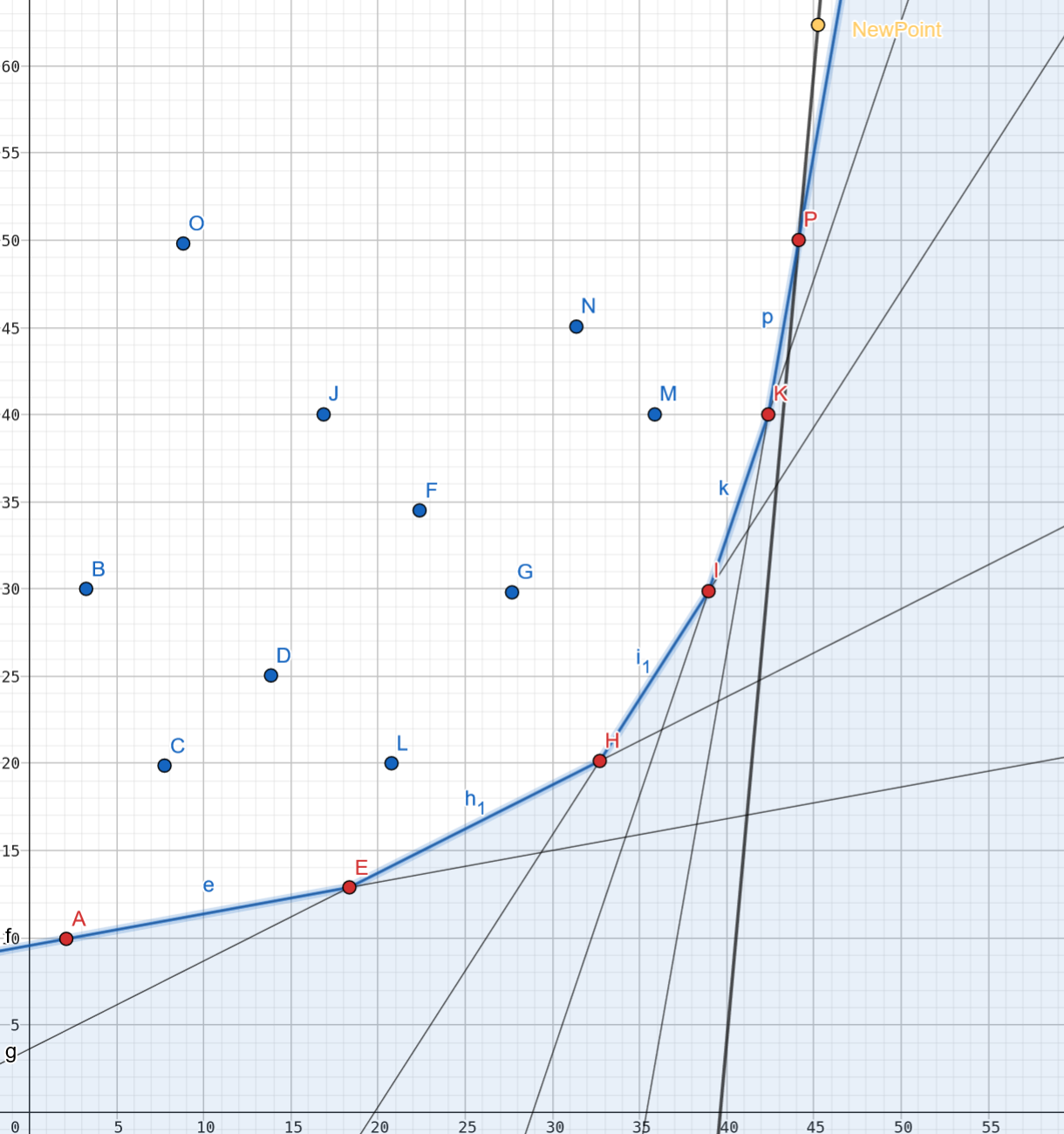
那如果加入凸包后凸包的下凸性质就不成立了呢?
那就从后往前删点,直到剩余图形满足凸包的下凸性质:

就像这样。
于是我们现在完成了维护凸包的任务。
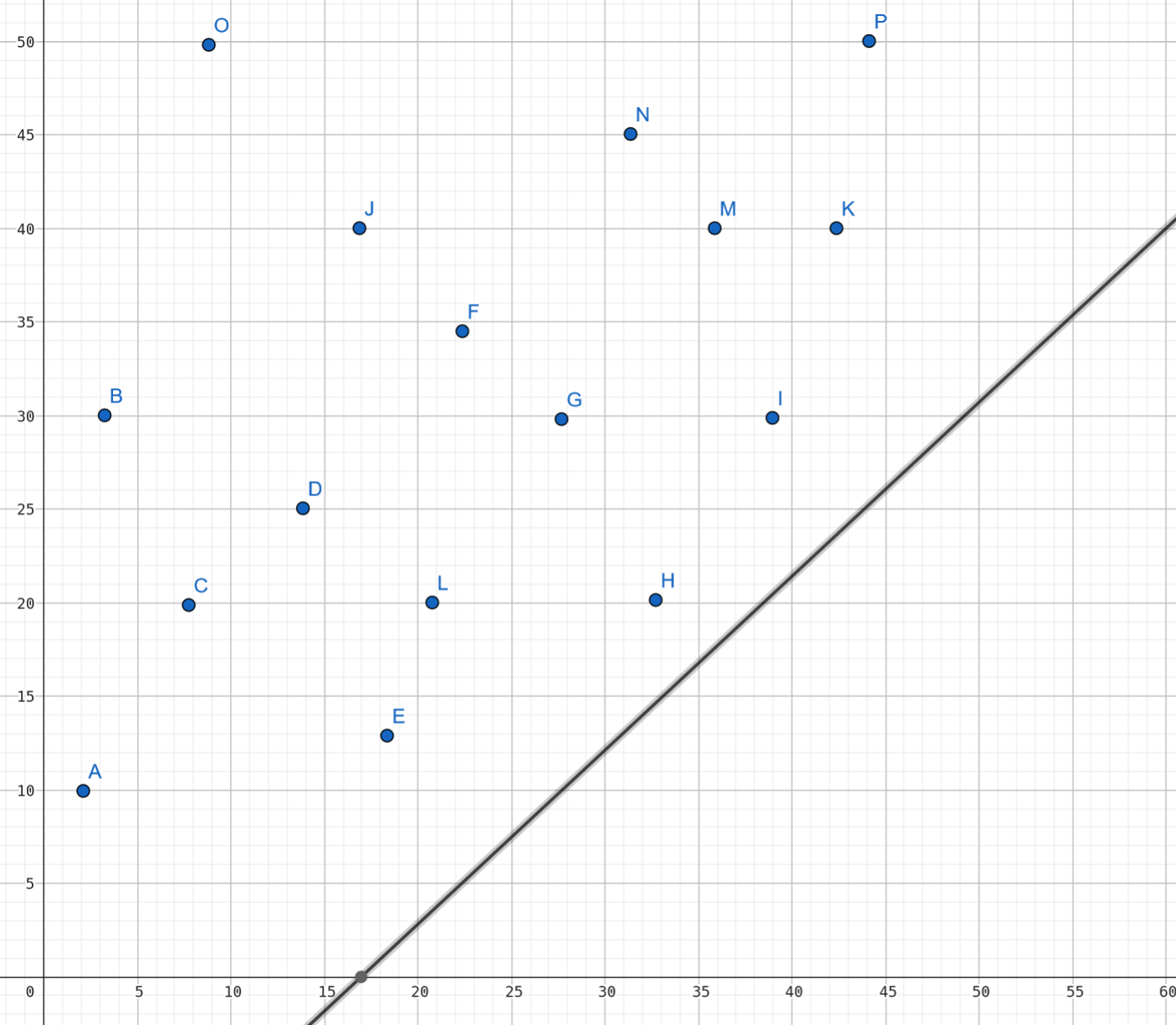
然后考虑截斜线
我们发现一个性质,随着 $j$ 的增大,$s_j$ 是单增的(前缀和啊)。
那么斜率 $w$ 就是单调递增的。
这里的单调能保证什么呢?
如果某个点对答案产生了贡献,由于之后的直线斜率越来越大,这个点左边的点就再也不可能对答案产生贡献了。
所以我们找某个斜率的最优点的时候,甚至不用二分斜率的位置,我们可以直接从最左边删起,直到删到最优点,利用单调性保证复杂度。

就非常好啊,这样我们就可以用单调队列来维护了。由于每层的每个点只会最多被加一次,删一次,所以单层复杂度为 $O(2n)$,所有层的复杂度为 $O(2mn)$
代码实现也很优雅:
#include<bits/stdc++.h>
#define int long long
#define PII pair<int,int>
using namespace std;
const int N = 3005;
int n,m;
int a[N],s[N];
int dp[N][N];
double slope(PII p1,PII p2){//斜率计算
return (double)(p1.second-p2.second)/(p1.first-p2.first);
}
PII q[N];
signed main(){
cin>>n>>m;
memset(dp,0x3f,sizeof(dp));
dp[0][0]=0;
for(int i=1;i<=n;i++)cin>>a[i],s[i] = s[i-1]+a[i];
int h,t;
for(int i=1;i<=m;i++){
h=1,t=0;//清空队列
for(int j=i;j<=n;j++){
//凸包加点
PII new_point = {s[j-1],dp[i-1][j-1] + s[j-1]*s[j-1]};
while(t-h>=1 && slope(q[t],new_point) < slope(q[t-1],q[t]))t--;
q[++t] = new_point;
//斜线来截
int k = 2*s[j];
while(t-h>=1 && slope(q[h],q[h+1]) < k)h++;
auto [sk,y] = q[h];//c++17神奇语法
dp[i][j] = y + s[j]*s[j] - k*sk;
}
}
cout<<m*dp[m][n] - s[n]*s[n];
return 0;
}
思路有点像最小凸包哦,真棒,kaiyi加油!